
什么是动态规划?
Intro
动态规划算法(Dynamic Programming,简称 DP)
动态规划是一种常见的「算法设计技巧」
动态规划遵循一套固定的流程:
递归的暴力解法 -> 记录数据的递归解法 -> 非递归的动态规划解法。
是常用的一种空间换时间的算法。
我觉得本质是自下向上的递归。
引例
斐波那契数列
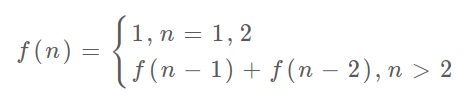
我们定义斐波那契数列为:
1 | 1 |
每一项为前两项之和,第一项和第二项为1.
我们可以根据以上定义,写一个输出第n项的递归程序
1 | int fiber(int n){ |
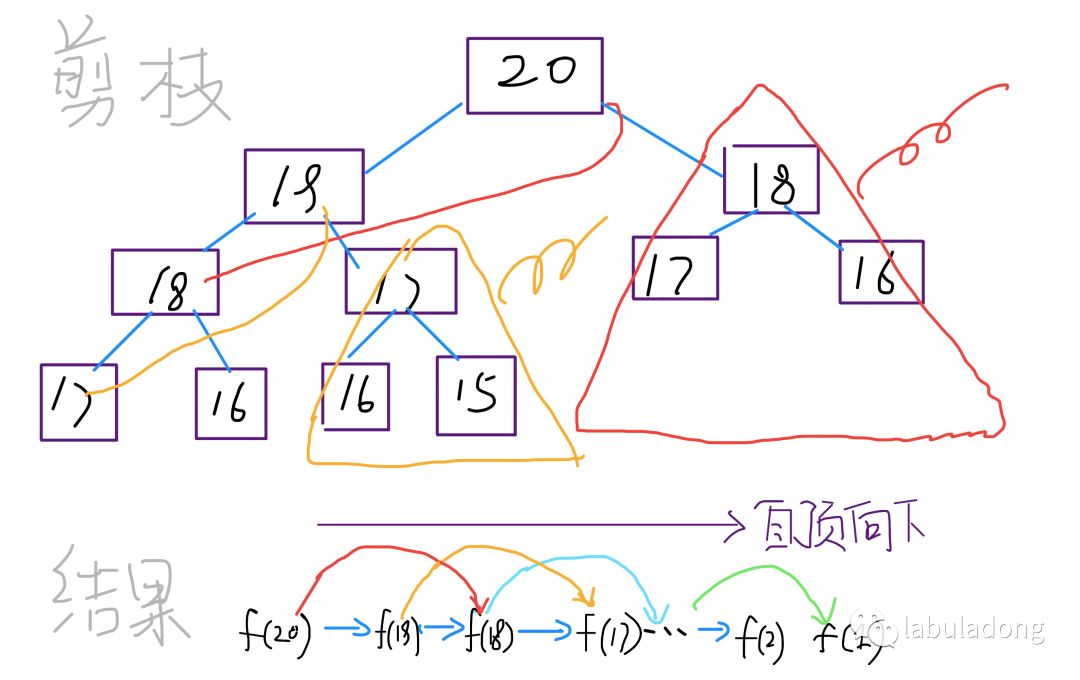
想要计算原问题 f(20)。
我就得先计算出子问题 f(19) 和 f(18),然后要计算 f(19),我就要先算出子问题 f(18) 和 f(17),以此类推。最后遇到 f(1) 或者 f(2) 的时候,结果已知,就能直接返回结果,递归树不再向下生长了。
时间复杂度计算
子问题个数 乘以 解决一个子问题需要的时间。
子问题个数:递归树中节点的总数。显然二叉树节点总数为指数级别,所以子问题个数为 O(2^n)
子问题时间复杂度:在本算法中,没有循环,只有 f(n - 1) + f(n - 2) 一个加法操作,时间为 O(1)。
这个算法的时间复杂度为 O(2^n),指数级别
缺陷
算法中存在大量重复计算,造成时间浪费。f(n-2)和f(n-1)重复出现,每出现一次就需要重复计算值。
*重叠子问题
既然f(n-2)和f(n-1)重复出现,我们可不可以所有重复出现的数值用一个备忘录记录下来,每次只需要直接拿出来用即可。
这就是动态规划问题的第一个性质:重叠子问题。
改进算法
1 | int fib(int N) { |
带「备忘录」的递归算法,把一棵存在巨量冗余的递归树通过「剪枝」,改造成了一幅不存在冗余的递归图,极大减少了子问题(即递归图中节点)的个数。
时间复杂度计算
- 子问题个数:即图中节点的总数,由于本算法不存在冗余计算,子问题就是 f(1), f(2), f(3) … f(20),数量和输入规模 n = 20 成正比,所以子问题个数为 O(n)。
- 解决一个子问题的时间,同上,没有什么循环,时间为 O(1)。
改进后的代码时间复杂度为O(n).
总结
带备忘录的递归解法的效率已经和动态规划类似。实际上,这种解法和动态规划的思想已经差不多了,只不过这种方法叫做「自顶向下」,动态规划叫做「自底向上」。
- 自顶向下:递归树从上向下延伸,将一个规模较大的问题向下逐渐分解成一个小问题,逐层返回答案
- 自底向上:反过来,我们直接从最小的问题,逐步向上推,得到我们想要的大规模问题的答案。
这就是动态规划的思路,这也是为什么动态规划一般都脱离了递归,而是由循环迭代完成计算。
动态规划
有了上一步「备忘录」的启发,我们可以把这个「备忘录」独立出来成为一张表,就叫做 DP table 吧,在这张表上完成「自底向上」的推算。
1 | int fib(int N) { |
*状态转移方程
若f(n)为一个状态n,则这个状态n就是由状态n-1加上状态n-2相加转移而来。
上面的几种解法中的所有操作,例如 return f(n - 1) + f(n - 2),dp[i] = dp[i - 1] + dp[i - 2],以及对备忘录或 DP table 的初始化操作,都是围绕这个方程式的不同表现形式。可见列出状态转移方程的重要性,它是解决问题的核心。很容易发现,其实状态转移方程直接代表着暴力解法。
动态规划问题最困难的就是写出状态转移方程
关于斐波那契数列最后一个优化。即并不需要储存从1到n之间所有的结果。我们只需要储存前两个结果并依次向后迭代即可。
1 | int fib(int n) { |
这一般是动态规划问题的最后一步优化,如果我们发现每次状态转移只需要 DP table 中的一部分,那么可以尝试缩小 DP table 的大小,只记录必要的数据,从而降低空间复杂度。
凑零钱问题
题目:给你 k 种面值的硬币,面值分别为 c1, c2 … ck,再给一个总金额 n,问你最少需要几枚硬币凑出这个金额,如果不可能凑出,则回答 -1 。
我提交的答案
1 | int coinChange(vector<int>& coins, int amount) { |
有点像贪心了,每次都取最优质值。然后再将剩下的数额再进行计算。如果出现最大数值最大情况凑不整。算法则会失败。
1 | [186,419,83,408] |
如上结果算法失败。
递归
用递归的方法去做这道题。
1 | int dp(vector<int> coins,int amount){ |
如果数额为0则直接返回0,如果小于0说明当前数值凑不齐。
画出程序递归树,由于每个节点都有n个分支,且数值越大问题规模越大,时间复杂度为O(n^j);
执行时间超出时间限制
使用memo数组记录数据
1 | int dp(vector<int> coins,int amount,vector<int> &memo){ |
执行时间1852ms
虽然这次能过AC但是 执行时间太久。
自下而上建立memo数组(动态规划)
1 | int coinChange(vector<int>& coins, int amount) { |
自下而上建立memo数组。
首先初始化amount = 0时,返回值为0
以上不同算法的提交记录
https://leetcode.cn/problems/coin-change

解题思路
首先,动态规划问题的一般形式就是求最值。动态规划其实是运筹学的一种最优化方法,只不过在计算机问题上应用比较多,比如说让你求最长递增子序列,最小编辑距离等等。
既然是要求最值,核心问题是什么呢?求解动态规划的核心问题是穷举。因为要求最值,肯定要把所有可行的答案穷举出来,然后在其中找最值呗。
动态规划这么简单,就是穷举就完事了?我看到的动态规划问题都很难啊!
首先,虽然动态规划的核心思想就是穷举求最值,但是问题可以千变万化,穷举所有可行解其实并不是一件容易的事,需要你熟练掌握递归思维,只有列出正确的「状态转移方程」,才能正确地穷举。而且,你需要判断算法问题是否具备「最优子结构」,是否能够通过子问题的最值得到原问题的最值。另外,动态规划问题存在「重叠子问题」,如果暴力穷举的话效率会很低,所以需要你使用「备忘录」或者「DP table」来优化穷举过程,避免不必要的计算。
以上提到的重叠子问题、最优子结构、状态转移方程就是动态规划三要素。具体什么意思等会会举例详解,但是在实际的算法问题中,写出状态转移方程是最困难的,这也就是为什么很多朋友觉得动态规划问题困难的原因,我来提供我总结的一个思维框架,辅助你思考状态转移方程:
明确 base case -> 明确「状态」-> 明确「选择」 -> 定义 dp 数组/函数的含义。
总结
计算机解决问题其实没有任何奇技淫巧,它唯一的解决办法就是穷举,穷举所有可能性。算法设计无非就是先思考“如何穷举”,然后再追求“如何聪明地穷举”。
列出状态转移方程,就是在解决“如何穷举”的问题。之所以说它难,一是因为很多穷举需要递归实现,二是因为有的问题本身的解空间复杂,不那么容易穷举完整。
备忘录、DP table 就是在追求“如何聪明地穷举”。用空间换时间的思路。
